موتورهای DC بدون جاروبک (Brushless DC Electric Motor) :
موتور الکتریکی DC بدون جاروبک (BLDC) که به عنوان موتور کموتاسیون الکترونیکی نیز شناخته می شود، موتور سنکرونی است که از منبع تغذیه الکتریکی جریان مستقیم (DC) و یک کنترلکننده الکترونیکی برای تغییر جریانهای DC به سیم پیچهای موتور استفاده میکند تا میدان مغناطیسی در فاصله هوایی تولید کند و روتور را به حرکت درآورد. (سنکرون به این معنی که میدان مغناطیسی ایجاد شده توسط استاتور و روتور با یک فرکانس واحد می چرخند.)
در این نوع موتورها ، سرعت و گشتاور موتور قابل تنظیم است در نتیجه این سیستم کنترل ، جایگزینی برای کموتاتور مکانیکی است که در موتورهای DC معمولی وجود دارد.
چگونگی کارکرد موتور BLCD :
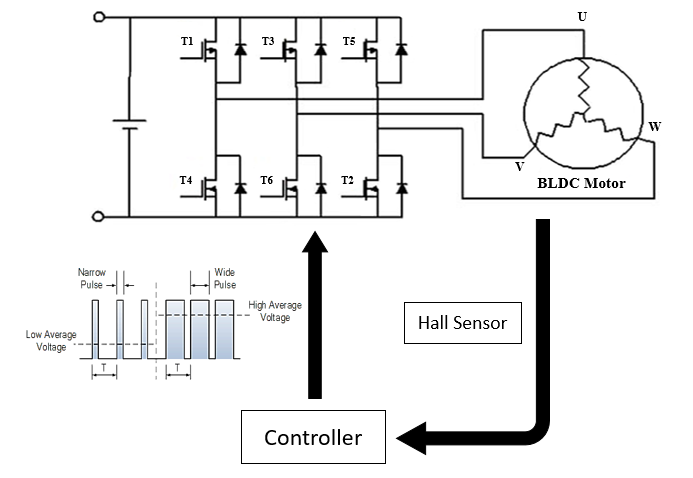
در موتورهای DC بدون جاروبک، یک سیستم سروو الکترونیکی جایگزین کموتاتور مکانیکی می شود و یک سنسور الکترونیکی اثر هال (Hall effect sensor)، موقعیت قرارگیری روتور را تشخیص میدهد و تریستورها یا سایر سوئیچ های الکترونیکی را کنترل میکند و موجب تغییر جریان سیمپیچها می شود و یا جهت جریان را معکوس میکند. حذف کموتاتور مکانیکی و استفاده از کموتاتور الکترونیکی سبب می شود تا موتور طول عمر بسیار بالاتری داشته باشد.
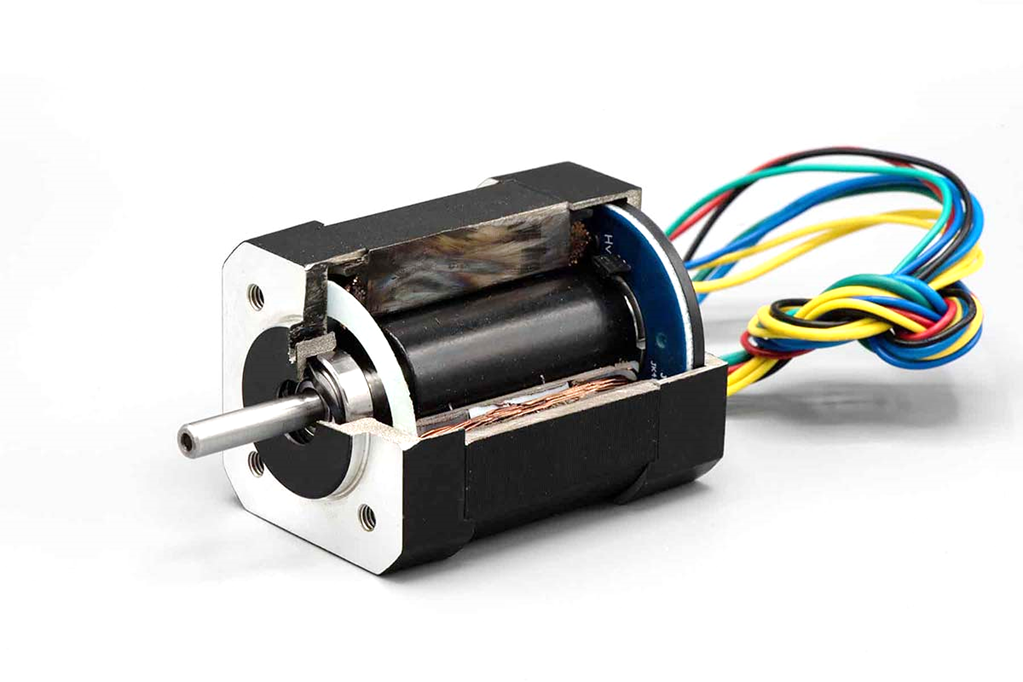
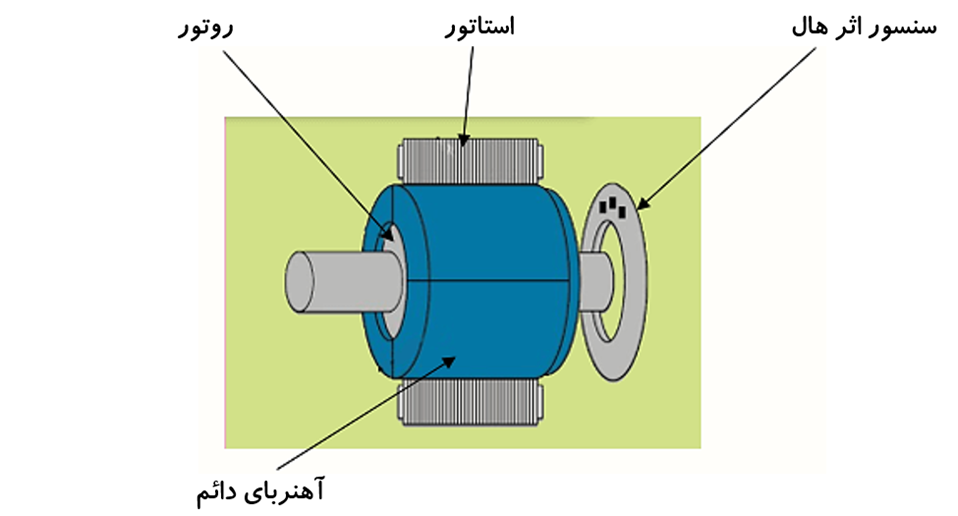
ساختار موتور BLCD :
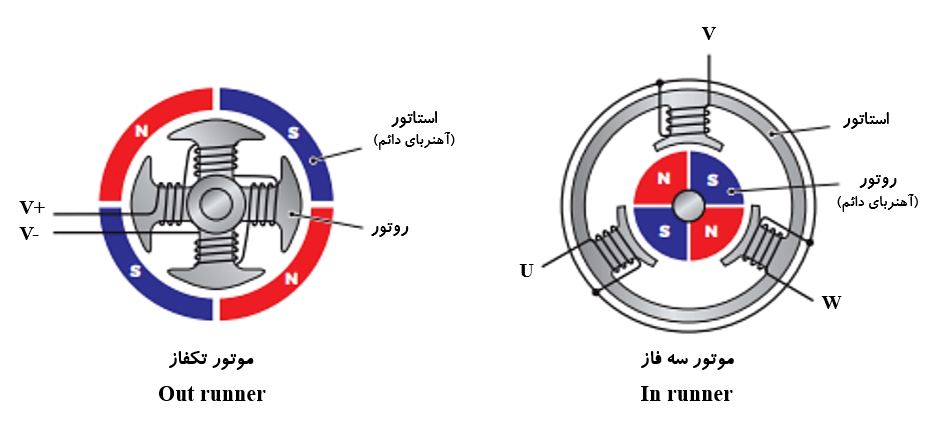
در این موتور آهنرباهای دائمی (Permanent Magnets) بر روی روتور و سیم پیچ های آرمیچر روی استاتور قرار دارند. سنسورهای اثر هال بر روی پوسته قرار دارند تا موقعیت روتور را تشخیص دهد.
انواع موتورهای DC بدون جاروبک از لحاظ ساختار:
Out runner :
روتور استوانه ای در داخل استاتور آهنربای دائم ، حول محور استاتور می چرخد. این نوع موتور برای کاربردهایی که نیاز به گشتاور بالا دارند و در جایی که دور در دقیقه بالا نیاز نیست ترجیح داده می شود.
In runner :
روتور به صورت یک آهنربای دائم استوانه ای شکل است که در داخل استاتور و حول محور استاتور می چرخد. این موتور گشتاور کمتری تولید می کند اما می تواند در دورهای بسیار بالا بچرخد.
کنترل سرعت و گشتاور موتور های BLDC :
روش های مختلفی برای کنترل سرعت و گشتاور این نوع موتورها وجود دارد که بسته به نوع کاربرد و دقت مورد نیاز، از یکی از این سیستم های کنترل استفاده می شود.
1- مدولاسیون عرض پالس (PWM (pulse wide modulation))
در این روش ولتاژ به صورت پالس به موتور DC اعمال می شود. با تغییر عرض پالس (مقدار در حال کار)، ولتاژ (ولتاژ متوسط) که موتور را به حرکت در می آورد، تغییر می کند و در نتیجه سرعت موتور تغییر می کند.
2- مدولاسیون دامنه پالس (PAM (Pulse Amplitude Modulation))
این روش مانند روش PWM است با این تفاوت که در این روش با تغییر دامنه ولتاژ پالس ها، ولتاژ اعمال شده به موتور را تغییر می کند.
3- کنترل سرعت با مدار الکترونیکی فیدبک دار: (Speed control by hardware)
کنترل سرعت موتورهای DC توسط مدار سخت افزار با استفاده مدارات مجتمع (IC ها) انجام می شود. در این حالت مدار سخت افزاری از دو نوع فیدبک استفاده می کند: فیدبک سرعت و فیدبک فاز. در این روش ، ابتدا کنترل سرعت تا رسیدن به محدوده مورد نظر توسط مدار فیدبک کنترل انجام گرفته و سپس برای رسیدن به مقدار دقیق سرعت مورد نظر، مدار فیدبک کنترل فاز عمل می کند. به عبارت دیگر ، دلیل اینکه کنترل سخت افزاری هم از فیدبک سرعت و هم از فیدبک فاز استفاده می کند این است که انحراف باقیمانده هنوز با فیدبک سرعت ، به تنهایی بسیار زیاد است. بنابراین، فیدبک فاز برای کاهش انحراف باقیمانده در این سیستم کنترل گنجانده شده است.
مزایای موتورهای BLDC :
- کنترل لحظه ای سرعت و گشتاور
- هزینه نگهداری کلی کمتر به دلیل عدم وجود جاروبک
- ابعاد کوچکتر با ویژگی های حرارتی بسیار برتر
- محدوده سرعت بالاتر و تولید نویز الکتریکی کمتر
- عدم وجود کموتاتور مکانیکی و در نتیجه عدم وجود مشکلات مربوط به آن
- راندمان بالا به دلیل استفاده از روتور آهنربای دائم
- سرعت عمل بالا چه در شرایط بار و چه بدون بار به دلیل عدم وجود جاروبک
- ابعاد موتور کوچکتر و وزن سبک تر در مقایسه با هر دو موتور DC با کموتاتور مکانیکی و موتور AC القایی (آسنکرون)
- عمر طولانی به دلیل عدم نیاز به بازرسی و نگهداری برای سیستم کموتاتور
- پاسخ دینامیکی بالاتر به دلیل اینرسی کم و قرار گیری سیم پیچ ها در استاتور
- تداخل الکترومغناطیسی کمتر
- صدای کم به دلیل عدم وجود کموتاتور مکانیکی
معایب موتورهای BLDC :
- این موتورها گران هستند.
- کنترل الکترونیکی مورد نیاز کنترل این موتور گران است.
- به مدارهای درایو پیچیده نیاز دارند.
- نیاز به سنسورهای اضافی دارند.
کاربرد موتورهای BLDC:
موتورهای بدون جاروبک در وسایلی مانند لوازم جانبی کامپیوتر (درایو دیسک، چاپگر)، ابزار برقی دستی ، لوازم خانگی نظیر ماشین های لباسشویی مدرن ، موتور کولرهای آبی ، وسایل نقلیه (هواپیماها ، خودروها و…) کاربرد دارند.




